

Gait Recognition with Drones A Benchmark
2023年8月24日,智能视觉计算联合研究中心(BNU-IVC)在IEEE Transactions on Multimedia 发表了题为Gait Recognition with Drones: A Benchmark的研究论文。该论文针对无人机视角下的步态识别问题提出了一个名为DroneGait的数据集,并针对该数据集提出了一种名为“Vertical Distillation”的新方法,该方法有效地提升了无人机视角下的步态识别准确率。
步态识别旨在通过身体形状和行走姿势来获取人的身份信息。现有的步态识别研究主要集中在低垂直视角的识别,即人和摄像机几乎处于相同的高度。与此不同的是,在这项工作中,我们关注无人机视角下的步态识别。为了促进研究,我们提出了一个名为DroneGait的新数据集,其中使用了无人机来收集步态数据。该数据集包含96名被试者的22,000个不同垂直视角下拍摄的序列,垂直视角变化范围从约0度到80度不等。此外,我们使用我们的数据集评估了几种最先进的基于外貌和基于骨架的模型的有效性,并建立了全面的基准线。我们的结果表明,该数据集具有挑战性,并为改进现有步态识别方法提供了重要机会。此外,我们提出了一种名为“Vertical Distillation”的新方法,该方法基于不同垂直视角之间的特征提取。我们的提出的方法在高垂直视角下明显优于DroneGait上的最先进模型。我们还进行了跨垂直视角和跨领域实验,以解释高垂直视角下步态识别的重要性。此外,我们使用热图可视化技术分析了不同垂直视角下的步态识别差异。
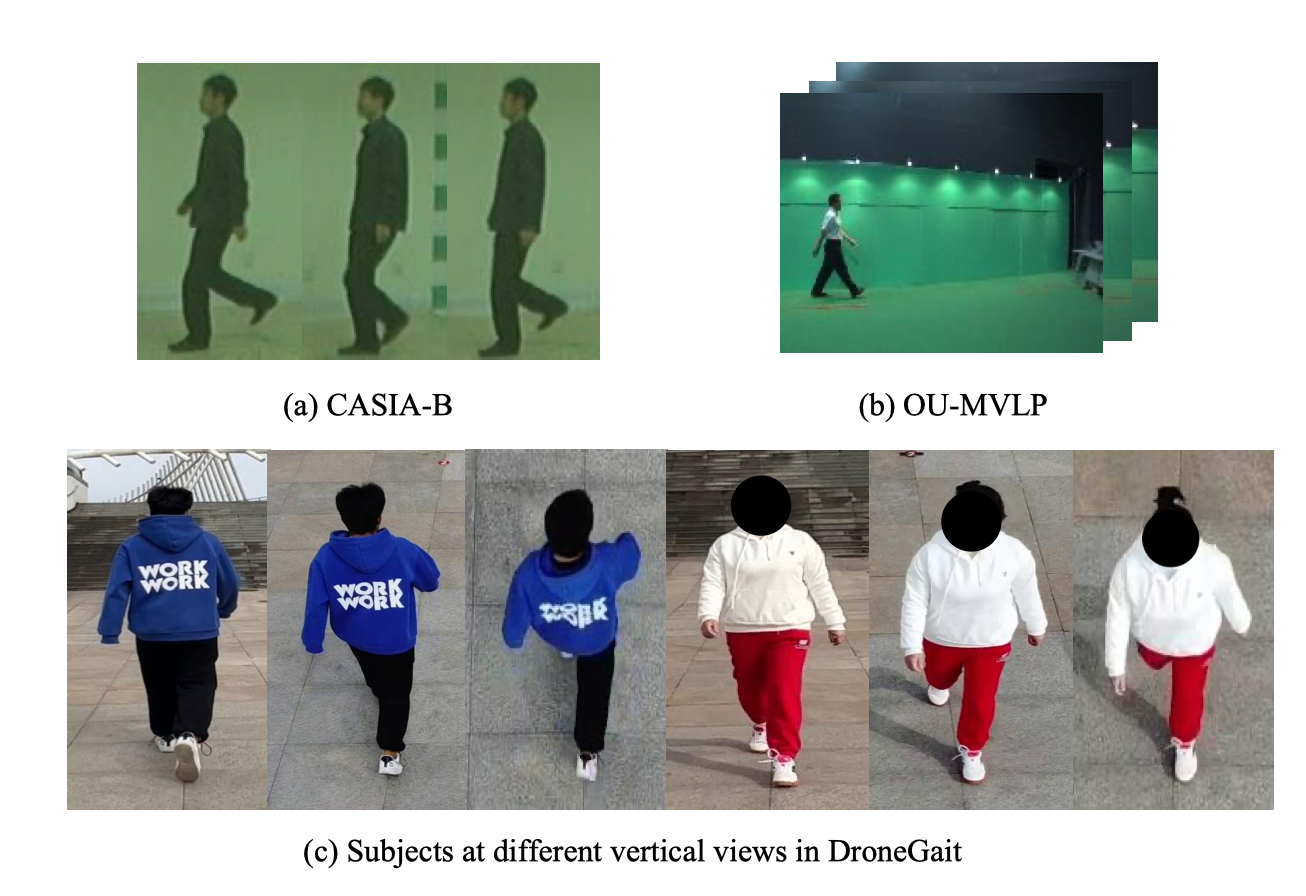
图1 DroneGait与其他主流步态识别数据集

图2 “Vertical Distillation”步态识别算法整体框架
本研究获得了中国国家自然科学基金(62276025、62206022)等的资助。论文第一作者为李奥奇;通讯作者为黄永祯教授与侯赛辉老师。
课题组老师联系方式:
黄永祯教授:huangyongzhen@bnu.edu.cn
侯赛辉老师:housaihui@bnu.edu.cn

